
自动驾驶技术路线:概述、分类、比较与评估

一、自动驾驶技术概述
自动驾驶技术是一种通过先进的感知、预测、决策和控制技术,使汽车能够自主驾驶的技术。这种技术的目标是提高驾驶的安全性、效率和舒适性,同时减少由人为因素引起的交通事故。自动驾驶技术路线是指导这种技术研发和应用的策略和方向。
二、技术路线分类
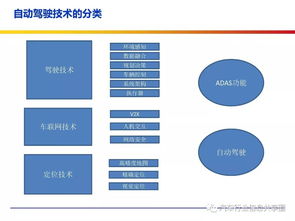
自动驾驶的技术路线主要分为基于感知的技术路线和基于预测的技术路线。基于感知的技术路线强调通过高精度的传感器获取车辆周围环境信息,从而指导车辆的驾驶;而基于预测的技术路线则更注重利用高精度地图、大数据和人工智能等技术,对车辆的未来行驶环境进行预测,进而制定驾驶策略。
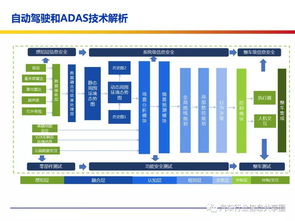
三、基于感知的技术路线

基于感知的技术路线主要是通过激光雷达、摄像头、超声波传感器等设备获取车辆周围环境信息,包括道路标志、其他车辆、行人等,并通过计算机视觉、模式识别等技术对获取的信息进行处理和分析,从而识别车辆所处的驾驶环境,指导车辆的驾驶。
四、基于预测的技术路线

基于预测的技术路线主要是通过高精度地图、GPS、大数据和人工智能等技术,对车辆的未来行驶环境进行预测,进而制定驾驶策略。这种技术路线主要依赖于对大量数据的分析和学习,通过机器学习等技术对车辆的行驶环境进行深度学习和预测,从而提前预知可能出现的交通情况,并做出相应的驾驶策略调整。
五、基于决策的技术路线
基于决策的技术路线主要是通过人工智能等技术,根据感知或预测得到的信息,结合车辆自身的状态,对车辆的驾驶行为进行决策。这种技术路线需要考虑多种因素,包括道路情况、交通状况、车辆自身的状态等,通过制定相应的决策规则和算法,实现决策的自动化和智能化。
六、基于控制的技术路线
基于控制的技术路线主要是通过控制理论和技术,对车辆的驾驶行为进行精确的控制和调整。这种技术路线主要依赖于对车辆动力学和运动学的深入理解和研究,通过优化控制算法和模型,实现对车辆的精确控制和调整,从而实现安全、高效和舒适的驾驶。
七、技术路线比较与评估

不同的技术路线各有优缺点。基于感知的技术路线能够获取更加准确的环境信息,但受限于传感器设备的精度和可靠性;基于预测的技术路线能够提前预知交通情况并做出相应的策略调整,但依赖于大量的数据分析和学习,需要较高的计算能力;基于决策的技术路线能够实现决策的自动化和智能化,但需要制定相应的决策规则和算法;基于控制的技术路线能够实现精确的控制和调整,但需要深入理解和研究车辆动力学和运动学。因此,在选择技术路线时需要根据实际情况进行综合考虑和分析。
八、技术发展与趋势预测

随着人工智能、传感器等技术的不断发展,自动驾驶技术也在不断进步和完善。未来,自动驾驶技术将朝着更加智能化、自主化和安全化的方向发展。同时,随着5G、V2X等技术的普及和应用,自动驾驶技术的通信和控制能力也将得到进一步的提升。预计未来十年内,自动驾驶技术将在部分领域得到广泛应用,如无人驾驶出租车、无人配送车等。